
洋上風力発電施設は、パーツによって異なりますが、耐用年数が20年と言われており、定期的なメンテナンスだけでなく、突然の故障にも対応する必要があります。海面下のO&M(Operation & Maintenance, 運用と保守)においては、ROV(遠隔操作無人潜水機)の利用が期待されています。ROVの活用事例をJOHNANの取り組みも含め、ご紹介します。
「ROVソリューション」は、ROVや水中ドローンに興味を持つ皆様に役立つ情報をお届けいたします。質問などございましたら、お気軽にお問い合わせください。
なお、このソリューションに関する当社の製品・サービスは、文末の「JOHNANソリューション」欄に掲載しております。>詳しくはこちら
ROVと洋上風力発電施設
(1) 日本における洋上風力発電市場について
日本の洋上風力は、資源エネルギー庁「洋上風力発電に関する国内外の動向等について(2023年11月)」によると、「洋上風力産業ビジョン」(2020年、官民協議会)において、政府として2030年10GW、2040年30~45GWの案件形成、産業界として2040年までに国内調達比率60%の目標を設定されています。2023年時点で、再エネ海域利用法に基づき、沿岸海域における着床式を中心に、年平均で1GWのペースで10箇所の促進区域を創出(合計4.6GW)しています。今後は2040年目標に向けて、着床式の案件が加速するとともに、沖合における浮体式に着手するする必要とされています。
洋上風力発電施設は、パーツによって異なりますが、耐用年数が20年と言われており、定期的なメンテナンスだけでなく、突然の故障にも対応する必要があります。海面下のO&M(Operation & Maintenance, 運用と保守)においては、ROV(遠隔操作無人潜水機)の利用が期待されています。
(2)ROVが利用される理由
洋上風力発電施設のO&MにROVが使用される理由は下記が想定されます。
●水中構造物の検査と修理
洋上風力発電施設は、海面下にも多くの重要な構造物があります。例えば、基礎部分やケーブル接続などです。ROVは水中での目視検査、損傷の調査、簡易な修理作業などを行うのに最適なツールとなります。
●安全性の確保
潜水士が海中で作業する場合、様々な安全上のリスクが伴います。特に急な悪天候や水深30mより深い場所の浮体式洋上風力発電施設での作業は危険となります。ROVを利用すれば、潜水士が直接環境に晒される必要が無く、安全に作業することができます。
●コスト効率
洋上風力発電施設における潜水作業は高い専門性や人数を要するため、費用が高額になる場合があります。ROVを利用することで省人化を図り、コスト削減と効率的なO&Mが可能となります。
●リアルタイムデータの提供
ROVはカメラや各種センサーを搭載しており、リアルタイムでのデータ収集が可能です。
●長期的な記録
ROVは長期にわたる記録にも使用されます。これにより、施設の状態変化を追跡し、予防保全や将来の改善策の立案に役立ちます。
以上のように、ROVは洋上風力発電施設のO&Mにおいて、安全性、効率性、柔軟性、およびコスト削減の観点から重要な役割を果たしています。
ROVによる作業事例
(1) サクションバケット基礎の施工確認
①吊り上げ前にROVで海底環境を探索します。
②サクションバケットの基礎が海底に沈みながら固定される様子をカメラでリアルタイムに観察することができます。
③光ファイバーケーブルが絡まないように監視します。
洋上風力発電施設の観察・点検
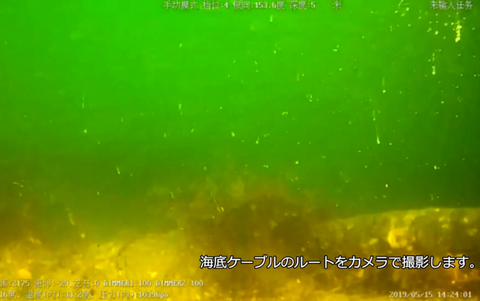
(2)海底ケーブルの経路探索
① Teledyne TSS 350を利用して海底のケーブルのルートと深さを特定します。
② カメラを使ってケーブルの状態を観察します。
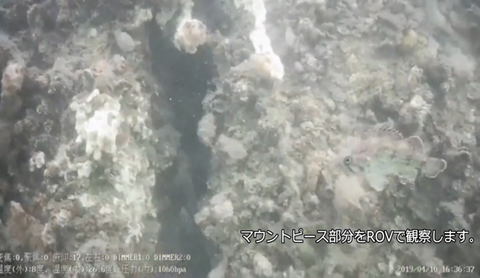
(3)マウントピースの観察
① マウントピースの劣化状況を観察します。
② マウントピースに貝などが付着して周辺に魚群が形成されている様子が分かります。
(4)水中金属棒の非破壊検査
①洋上風力発電施設の水中部分は長時間海水に浸かっている。水中の金属棒は海水によって深刻な腐食が発生します。水中の非破壊検査は特に重要です。
② ROVには超音波厚さ計を装備して水中金属棒の壁厚を測定し、損傷を確認します。
③ ROVにプローブを装備して、電位を測定することで犠牲陽極の腐食を測定します。
JOHNANソリューション
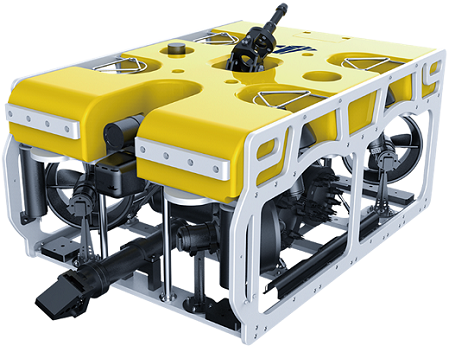
当社のMOGOOLシリーズは洋上風力発電施設に関するO&Mの実績がございます。実証試験等のデモンストレーションにも対応しておりますので、一部機種に限られますが実機をご覧いただくことも可能です。もしこのような作業ができないか?等のご相談がございましたら、お気軽にお問い合わせください。
当社の利用機種のご紹介
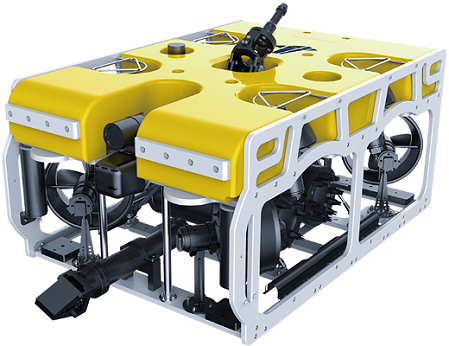
(1)MOGOOL-PRO P3000-A

サイズ(mm):H697×W484×D475
重量(Kg):36
ケーブル長(m):200,300
最大深度(m):300
最大速度(静止水中,Kn):2.5
水中可搬重量(Kg):5.5
特徴
-
P3000-Aは、高い推進力かつコスパが良いオススメのモデルです。パワフルな機体のため、ダム、湖沼、港湾、内海はもちろんのこと、外海でもご利用いただくことが可能です。
-
給電式の200V電源に対応しており、水中可搬重量が5.5kgあるため、様々なマニピュレータやソナーを搭載することが可能です。
(2)MOGOOL-PRO P14000-ⅡA
サイズ(mm):H1070×W720×D569
重量(Kg):120
ケーブル長(m):200,300,400
最大深度(m):300
最大速度(静止水中,Kn):3.0
水中可搬重量(Kg):10.5
特徴
- MOGOOL-PROの中でも、P14000シリーズは水中可搬重量が大きく取ることができ、様々なオプションを搭載することができます。
- 例えば、掲載しているP14000-ⅡAでは10.5㎏、最も大きいP14000-ⅢAでは70㎏となっています。
(3)上記機種や他の機種について
当社のROV「MOGOOLシリーズ」の製品紹介ページをご覧ください。
おすすめのオプション品について
(1)OCULUS Mシリーズ(Blueprint Subsea社)

小型のマルチビームソナーです。水中が濁っていたとしても、水中の対象物を観測することができます。周波数が高周波の場合は対象物を詳細に捉えることができ、低周波の場合は広範囲の中から対象物を探索することができます。
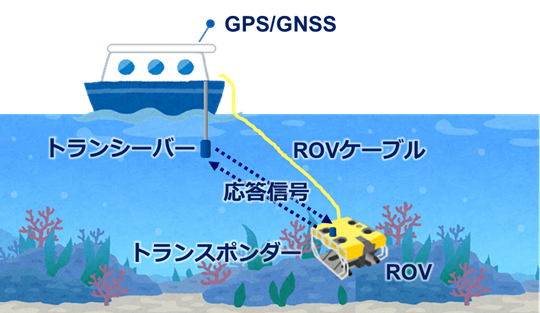
(2)USBL(Ultra Short Base Line)水中音響測位装置
- GPSなどと連動させ水中に潜ったROVの位置や深度を追跡するためのシステムです。弊社ではSeaTrac(Blueprint Subsea社)やTrack Link 1500(LinkQuest社)の搭載実績があります。
- さらに、弊社ではUSBLで取得したデータをもとに緯度経度の地図上に、船やROV、目標物を表示させてカーナビのようにROVを操作できる「スリーポイントビューワ」ソフトを開発しております。
アフターサービスについて
MOGOOLシリーズのメンテナンスや修理は、当社の京都にて随時対応しておりますので、安心してご利用いただけます。ご不明な点やご質問などございましたら、お気軽にお問い合わせいただけますと幸いです。


{kind=link}
{kind=link}
{kind=link}
{kind=link}
関連ソリューション
WEB商談も対応可能!製品情報・御見積に関するご依頼・ご質問等お気軽にお問い合わせください。
(平日8:30~17:00)